| ||||||||||||||||
| ||||||||||||||||
| ||||||||||||||||
|
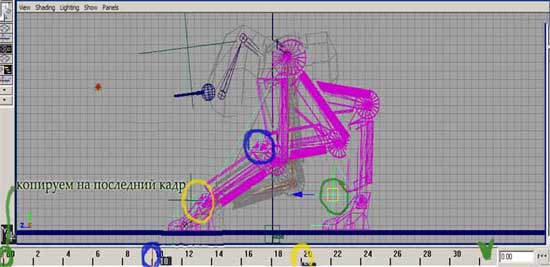
Уроки MAYA. Цикличная анимация идущего робота.  Выбираем инструмент кости ( Joint Tool ) и вперед (делаем все как на картинке): 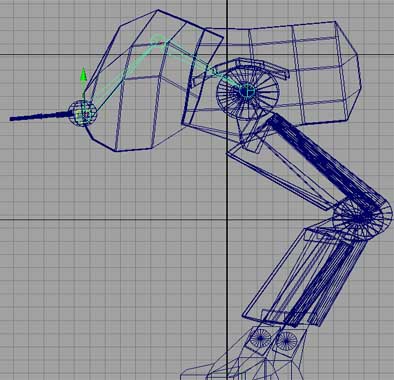 Теперь выбираем кость последнюю кость она помечена красным кругом, кликаем на ней уже выбранным инструментом. 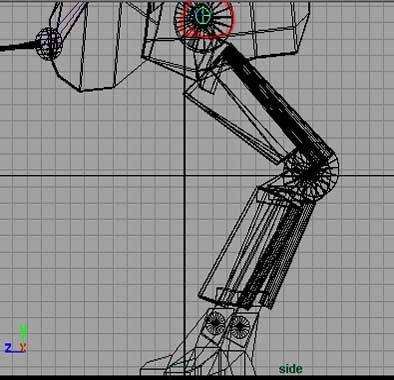 Переключаемся в другой вид и продолжаем строить скелет: 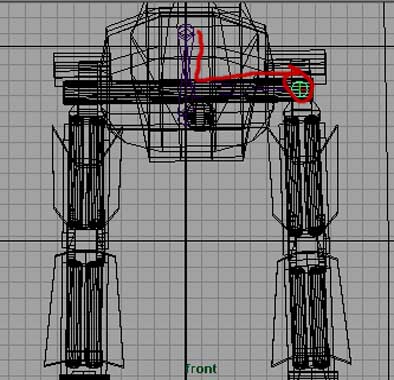 Заканчиваем первую ногу: 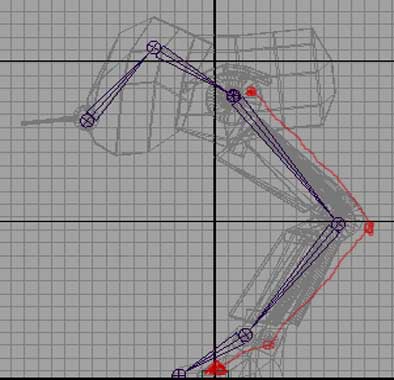 Повторяем все для второй ноги и в итоге должно получится следующее: 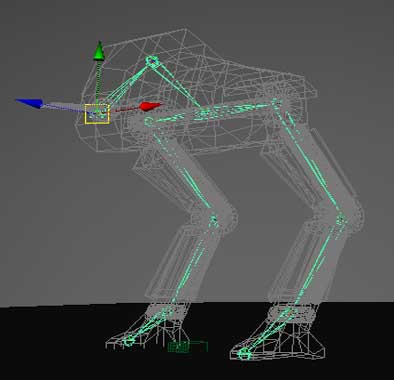 Далее будем делать привязку, выбираем объект который хотим привязать (А) и удерживая Shift выбираем ту кость к которой хотим перевязать (В), далее нажимаем кнопку P ( Parent ), и тем самым привязываем нужную часть модели к соответствующей части скелета. Далее привязываем оставшиеся части модели к соответствующем частям скелета. 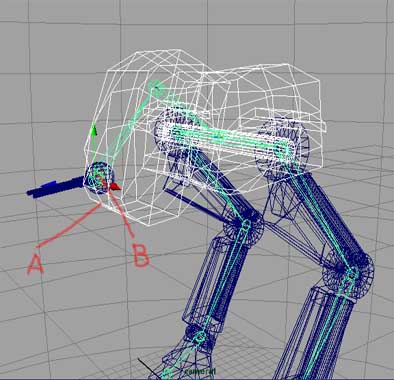 Затем выбираем инструмент IK Handle Tool и проделываем следующие операции: соединяем выделенные желтым суставы между собой (А), затем повторим еще раз для суставов помеченных зеленым (В). И соответственно повторяем все для второй ноги... 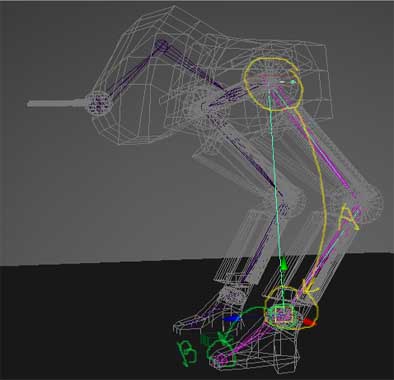 Теперь добавим в сцену Locator и сделаем следующую привязку ( P - если забыли) ikHandle1 + ikHandle привязка к Locator . Вот и все, теперь двигая наш Locator вся нога включая сустав будет "адекватно" двигаться. повторяем для второй ноги. 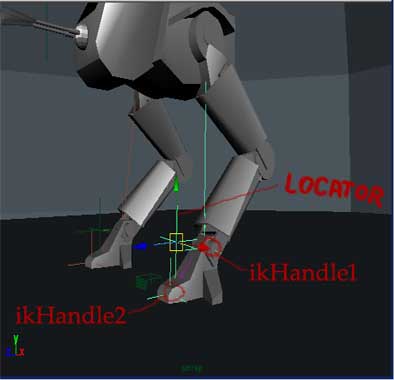 Затем создадим еще один Locator и привяжем контрольную часть скелета к нему (что выделять и к чему привязывать показано на рисунке). 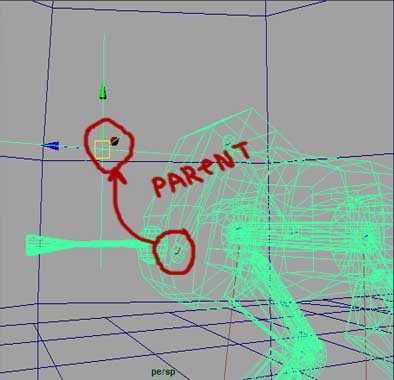 Ну вот, теперь можно приступать к самому интересному, к анимации. Но надо заметить, что неплохо бы ограничить движение суставов (что бы металлические формы не входили сами в себя), но это не входит в урок. Если у вас будет желание вы без проблем разберетесь глядя на рисунок... 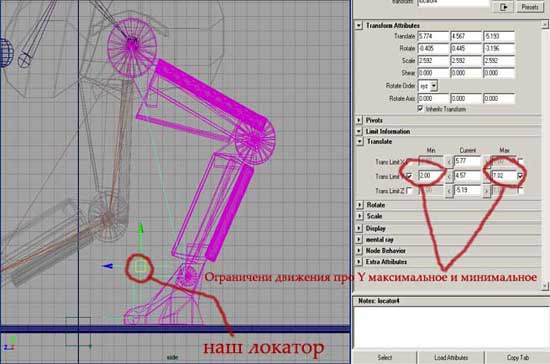 Теперь поставим нашего робота в нужную нам позицию потянув за Locator -ы: 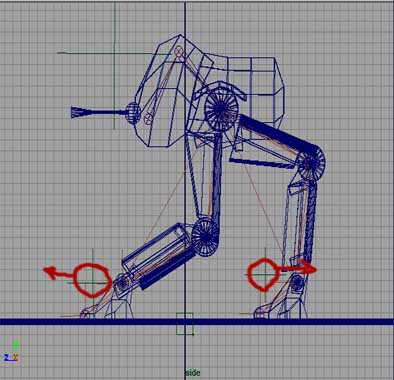 Теперь главное не пугаться, на самом деле все просто. Делаем Set Key Выделенному нами Locator - у (зеленый кружок) на кадре "0". Затем перемещаемся в кадр 10 и соответственно перемещаем Locator в область синего кружка и делаем Set Key , теперь перемещаемся в кадр 20 и перемещаем Locator в область желтого кружка, делаем Set Key ну и наконец копируем наш нулевой кадр на место последнего кадра оно помечено зеленой птичкой. Все цикл движения одной ноги завершен. Теперь самостоятельно анимируем тем же образом вторую ногу (само собой с той точки на которой она стояла)
 В итоге у нас получился робот и две "шагающие" ноги. Но нам этого само собой мало, теперь необходимо добавить покачивание корпуса в стороны. Делаем следующим образом, берем за верхний Locator (ставим ключ Set key ) и передвигаем его в ту сторону на которую сейчас робот приседает (то есть в сторону опорной ноги), само собой вы должны не забывать передвигаться на нужное количество кадров (ставим ключ Set key ). Можем его не только подвинуть, но и слегка наклонить. Затем следуя зеленым кружкам перемещаем Locator согласно движению той ноги на которую он становится и так далее главное не забывать ставить ключи и перемещаться на нужное количество кадров. 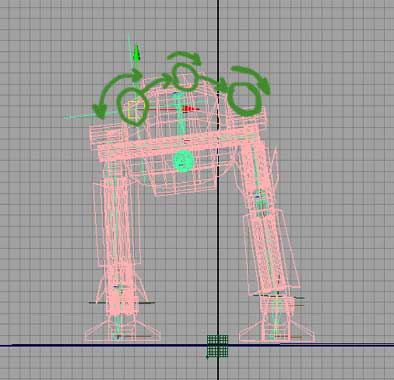 Если возникли какие то трудности, то повторяем сначала ориентируясь на то как мы анимировали ноги робота. В результате у нас получился шагающий робот у которого башня накреняется в такт шагам.
Теперь дело за малым, он у нас конечно ходит, но только на протяжении 32 кадров. Вот здесь нам и пригодится Graph Editor. Откроем его выделим нужный нам Locator , далее Curves => Post Infinity => Cycle 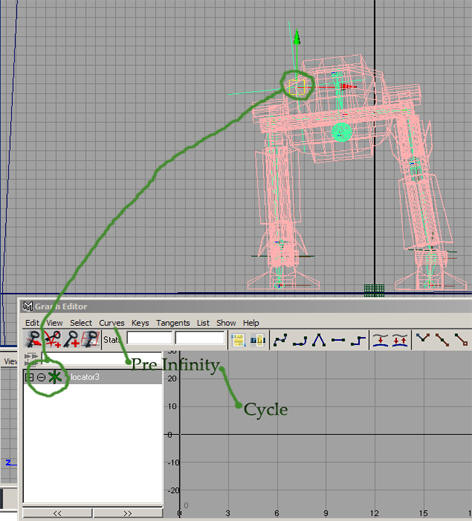 Всего их у нас 3-и Locator- а и данную процедуру придется трижды повторить для каждого и з них. Теперь сколько кадров не выставляй он у нас будет неустанно идти вперед. *** Успехов, надеюсь у вас все получилось, если вам что то показалось непонятным и т.д. свяжитесь со мной, помогу... |
|
|
| ||||||||||||||||
|